AK-SERVO 步進閉迴路伺服馬達

![]()
![]()
![]()
![]()
![]()
![]()
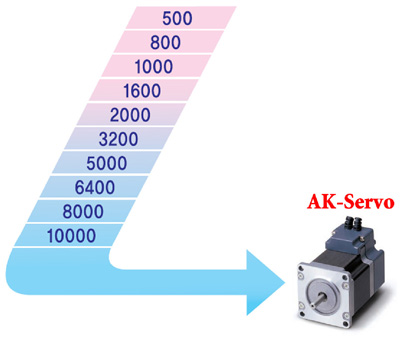
位置指令可以被精密的切割。(最大10000 pulses/R)
![]()
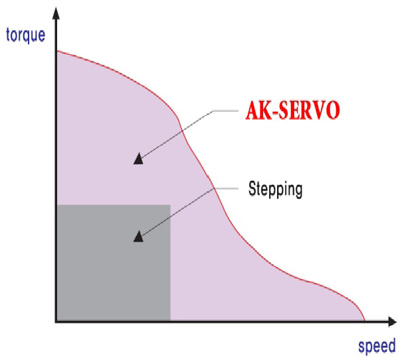
跟一般的步進作比較,AK-SERVO在大部份的時間可保持較大的扭矩,可以確保在百分之百的負載之下沒有失步現象,然後也不需要去關注負載的偏差量。
![]()
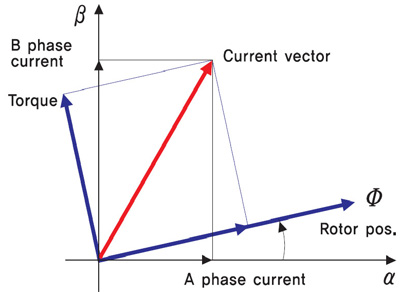
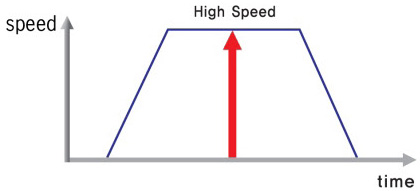
AK-SERVO在高速時也不會有失步現象,即使在百分之百的負載之下,它是時時去確認現在最佳的觸發角度,以達到最高扭力。
![]()
由於驅動器的使用電流是依據它的負載做變動,所以它可以減少熱量的產生,改善效能。

馬達規格 |
AK-42L |
AK-56L |
|
伺服器規格 |
AK-D-42L |
AK-D-56L |
|
操作方式 |
32bit DSP 閉環路控制 | ||
輸入電壓 |
24VDC ± 10% (主要迴路) | ||
控制環境條件 |
周遭溫度 | 使用中溫度 : 0~55℃ In Storage : -20 ~70 ℃ | |
| 溼度 | 90%RH(Non-condensing) | ||
| 反震動 | 0.5G | ||
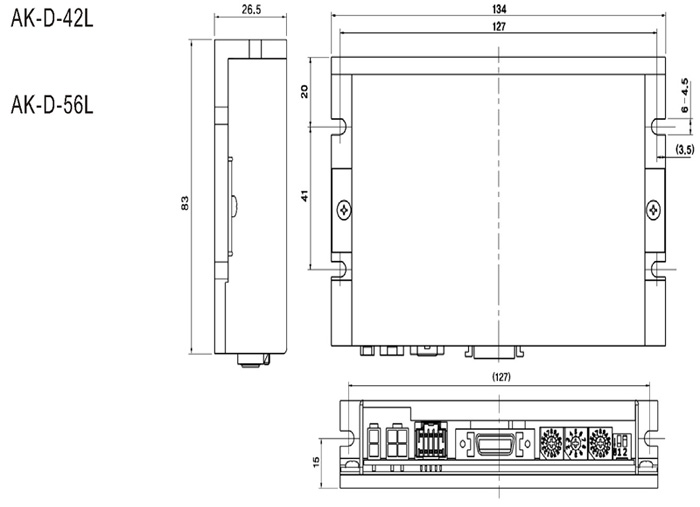
尺寸 |
W134 X H26.5 X D83(mm) | ||
功能 |
旋轉速度 | 0~3000 rpm | |
| 解析度(P/R) | 500,800,1000,1600,2000,3200,5000,6400,8000,10000 (選定的旋轉式開關) | ||
最大輸入脈波頻率 |
500KHz | ||
| 警報功能 | 過電流,過速度,速度異常,過熱,過電壓 | ||
| LED展示 | 電流狀態,警報狀態,定位狀態,SERVO ON狀態。 | ||
| 定位選擇 | 0~F(Selectable with rotary swich) | ||
| 扭力濾波常數 | 0~F(Selectable with rotary swich) | ||
| 脈波輸入方法 | 1Pulse / 2Pulse (Selectable with DIP swich)脈衝輸入方式選擇(1P/2P) | ||
| 旋轉方向 | CW / CCW (Selectable with DIP swich) 循環方位的選擇(CW/CCW) | ||
| 速度/定位 控制指令 | 脈波連續輸入 | ||
I/O 信號 |
輸入信號 | 光耦合輸入: 定位指令脈波, SERVO On/Off, 警報重設 | |
| 輸出信號 | 光耦合輸出: 定位,警報 |
||
● 驅動器尺寸[mm]
● 馬達規格詳述
規格 |
單位 |
AK-42L |
AK-56L |
|
| 驅動方法 | ---- |
雙極 |
雙極 |
|
| 相數 | ---- |
2 |
2 |
|
| 電壓 | V |
2.76 |
4.0 |
|
| 電流 | A / PHASE |
1.2 |
2.0 |
|
| 線圈電阻 | Ω/ PHASE |
2.3 |
2.0 |
|
| 電磁感應 | mH / PHASE |
4.0 |
7.35 |
|
| 保持扭矩 | mN.m |
403 |
1373 |
|
oz.in |
57 |
194 |
||
| 止動扭力 | mN.m |
19.6 |
69 |
|
oz.in |
2.8 |
9.8 |
||
| 轉動慣性 | g.cm2 |
85 |
269 |
|
oz.in2 |
0.46 |
1.47 |
||
| 重量 | g |
360 |
1000 |
|
1b |
0.79 |
2.2 |
||
| 絕緣等級 | ---- |
(UL VALUE : CLASS B 130℃ 266℉) |
||
| 絕緣電阻值 | ---- |
500VDC 100M Ω min. |
||
| 絕緣強度 | ---- |
500VAC 50HZ 1min. |
||
| 操作溫度範圍 | ℃ |
0 to 50 |
||
| 允許的溫度範圍 | ℃ |
70 |
||
| 負載承受能力 | 垂懸力 | kgf |
5.2 |
|
| 推力 | kgf |
低於馬達重量 |
||
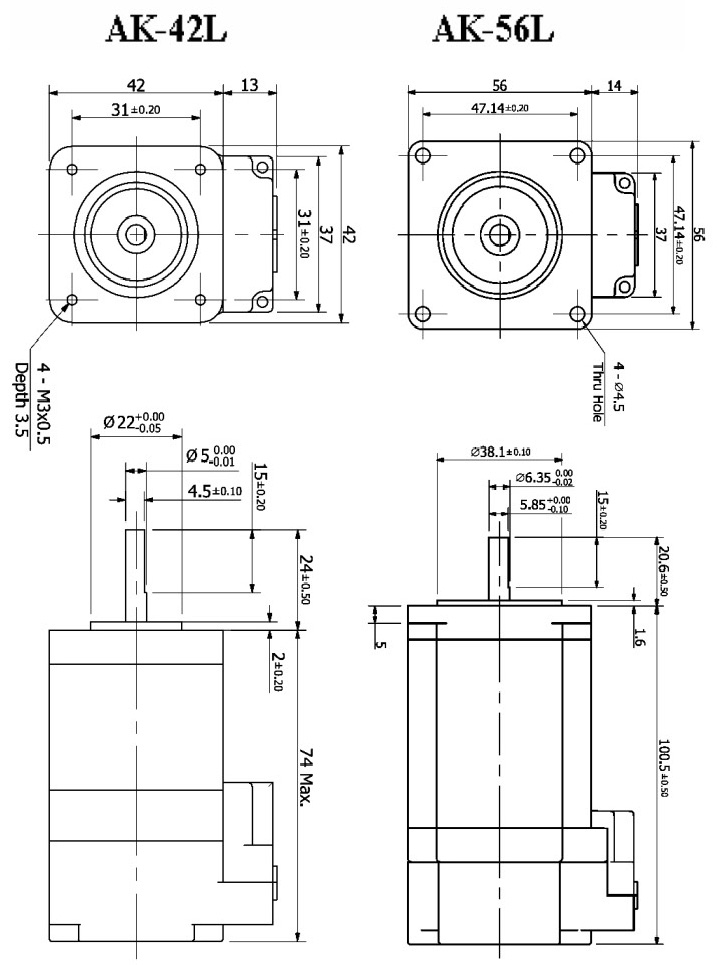
● 馬達尺寸[mm]
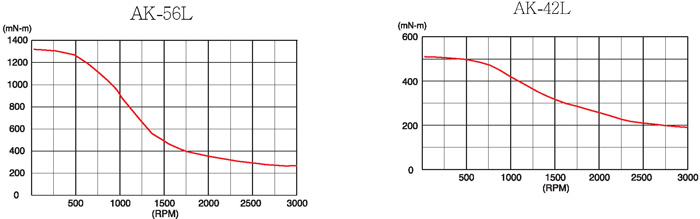
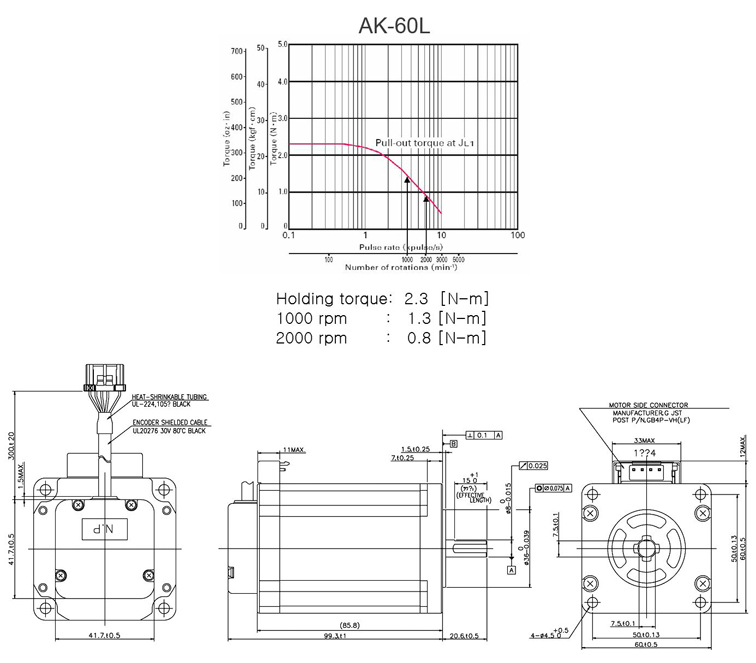
● 馬達轉矩特性
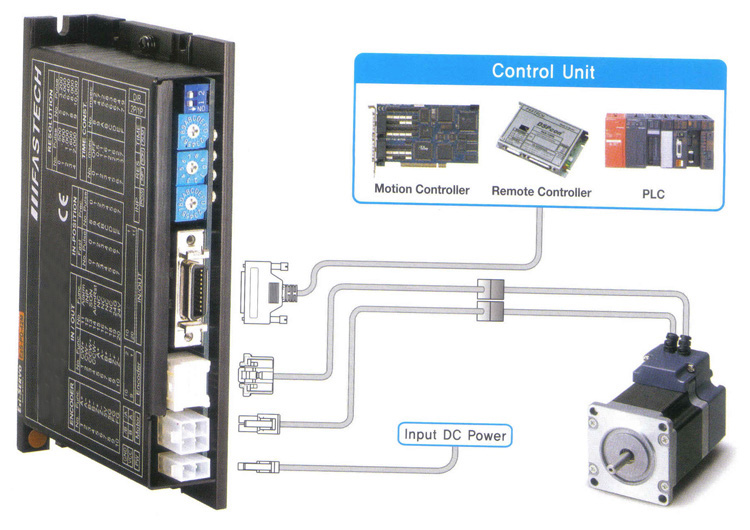
● 系統表面配置
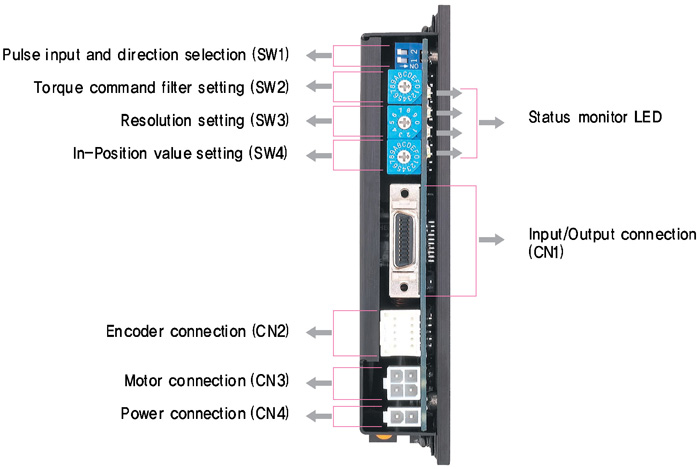
1. 狀態監控 LED
指示 |
顏色 |
功能 |
閃爍條件 |
電源 |
綠色 |
電源輸入指示 | 燈亮表示電源開啟 |
定位 |
黃色 |
完成定位動作 | 燈亮表示當位置錯誤直到位置被旋轉開關重設脈衝選定為止。 |
伺服狀態 |
橘色 |
指示伺服ON/OFF | 伺服開啟:燈亮 |
警報 |
紅色 |
警報指示 | 閃爍時,即保護功能啟動(計算閃爍的次數即可辨示何種保護模式) |
◆保護功能及LED的閃爍次數
閃爍次數 |
保護警戒 |
條件 |
1 |
過電流 |
電流超過設定值。 |
2 |
速度過快 |
馬達速度超出3000rpm。 |
3 |
速度異常 |
馬達無法跟隨指令脈衝數。 |
4 |
超過負荷 |
過負載超過5秒即發生警報。 |
5 |
過熱 |
驅動器內部溫度超過50度C |
6 |
超過蓄熱電壓 |
反電動勢超過70V |
7 |
馬達連接 |
電源開啟卻沒有連接馬達電纜線到驅動器 |
8 |
編碼器連接 |
驅動器的Encoder接線錯誤 |

閃爍次數 |
開關名稱 |
脈衝輸入選擇開關方式 |
1P / 2P |
選擇脈波輸入模式 |
開關脈衝輸入模式(1-單脈衝 or 2-雙脈衝) 1P :單-脈衝輸入模式 (On) 2P : 雙-脈衝輸入模式(Off)-不執行 |
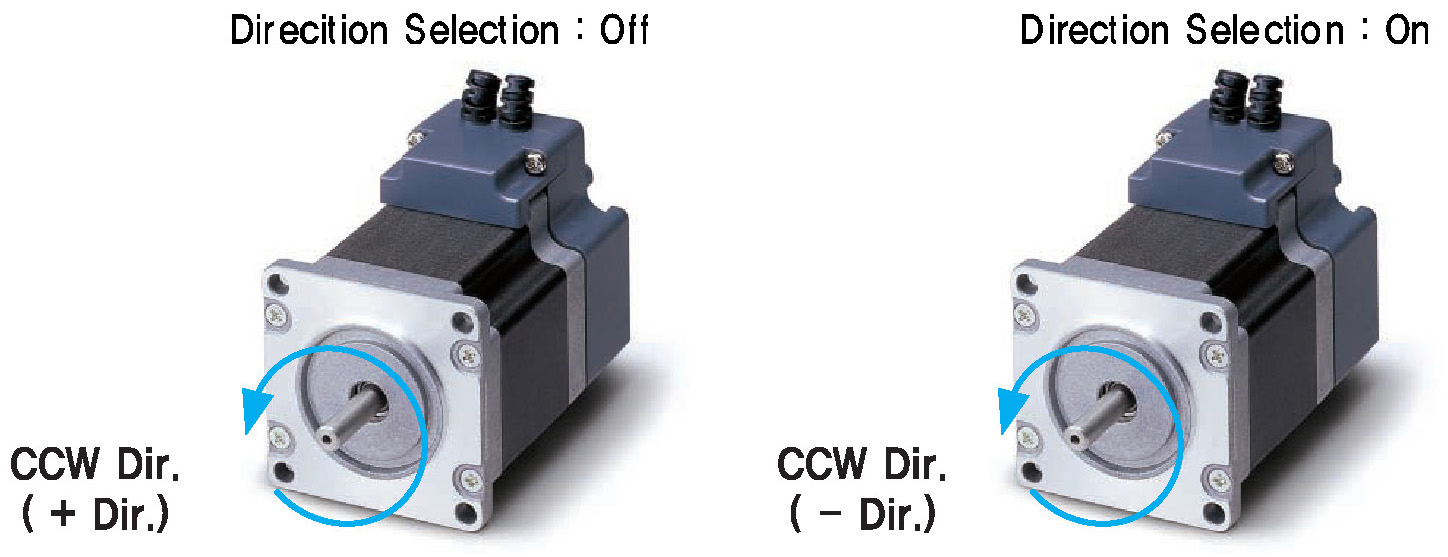
旋轉方向選擇 (pin #2) |
開關旋轉方向 |
CCW(+Direction) : Off-不執行 CW(+Direction) : On 視馬達承軸而定 |
2.脈衝輸入及馬達方向選擇開關(SW1)
3.位置控制器的增益選擇開關描述(SW2)
位置控制器的目的在於停止之後修正馬達被負載及摩擦力偏離的位置,根據馬達的負載,使用者必須選擇開關的位置,因為如此系統才能夠穩定且修正可能由於速度過快所造成的錯誤。
調整控制器
1.設定開關位置為”0”
2.旋轉開關直到系統穩定。
3.旋轉開關於 +/- 1~2 位置可達到更好的效果。
指示 |
整合部分的時間常數* |
比例增益* |
0 |
1 |
1 |
1 |
1 |
2 |
2 |
1 |
3 |
3 |
1 |
4 |
4 |
1 |
5 |
5 |
1 |
6 |
6 |
2 |
1 |
7 |
2 |
2 |
8 |
2 |
3 |
9 |
2 |
4 |
A |
2 |
5 |
B |
3 |
1 |
C |
3 |
2 |
D |
3 |
3 |
E |
3 |
4 |
F |
3 |
5 |
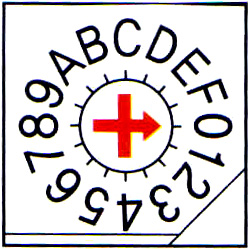
4.決定選擇開關(SW3)
每一圈的脈波數
指示 |
脈波 /一圈 |
指示 |
脈波 /一圈 |
0 |
500 |
5 |
3200 |
1 |
800 |
6 |
5000 |
2 |
1000 |
7 |
6400 |
3 |
1600 |
8 |
8000 |
4 |
2000 |
9 |
10000 |
5.定位數值設定開關(SW4)
指示 |
所在位置值[脈衝] 快速回覆 |
指示 |
所在位置值[脈衝] 快速回覆 |
0 |
0 |
8 |
0 |
1 |
1 |
9 |
1 |
2 |
2 |
A |
2 |
3 |
3 |
B |
3 |
4 |
4 |
C |
4 |
5 |
5 |
D |
5 |
6 |
6 |
E |
6 |
7 |
7 |
F |
7 |

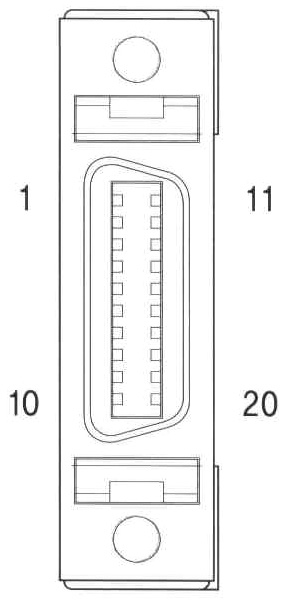
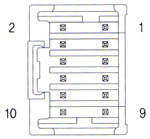
6. 控制信號輸入/輸出信息 (CN1)
NO. |
功能 |
I / O |
1 |
CW+(Pulse+) |
Input |
2 |
CW-(Pulse-) |
Input |
3 |
CCW+(Dir+) |
Input |
4 |
CCW-(Dir-) |
Input |
5 |
A+ |
Output |
6 |
A- |
Output |
7 |
B+ |
Output |
8 |
B- |
Output |
9 |
Z+ |
Output |
10 |
Z- |
Output |
11 |
警報 |
Output |
12 |
定位 |
Output |
13 |
伺服 On / Off |
Input |
14 |
警報重設 |
Input |
15 |
NC |
---- |
16 |
NC |
---- |
17 |
NC |
---- |
18 |
NC |
---- |
19 |
24VDC GND |
Input |
20 |
24VDC |
Input |
7.馬達連結 (CN3)
NO. |
功能 |
1 |
A Phase |
2 |
B Phase |
3 |
/A Phase |
4 |
/B Phase |
8.編碼器連結 (CN2)
NO. |
功能 |
I / O |
1 |
A+ |
Input |
2 |
A- |
Input |
3 |
B+ |
Input |
4 |
B- |
Input |
5 |
Z+ |
Input |
6 |
Z- |
Input |
7 |
5VDC |
Output |
8 |
5VDC GND |
Output |
9 |
Frame GND |
---- |
10 |
Frame GND |
---- |
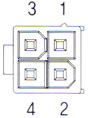
9.電源連結(CN4)
指示 |
功能 |
1 |
輸入電源 : 24VDC ±10% |
2 |
轉入電源 GND |

● 外部線圈圖解
種類 |
電源纜線 |
馬達電源線 |
編碼器纜線 |
控制器纜 |
標準距離 |
- |
30cm |
30cm |
- |
最大距離 |
2m |
20m |
20m |
20m |
● 連結圖示
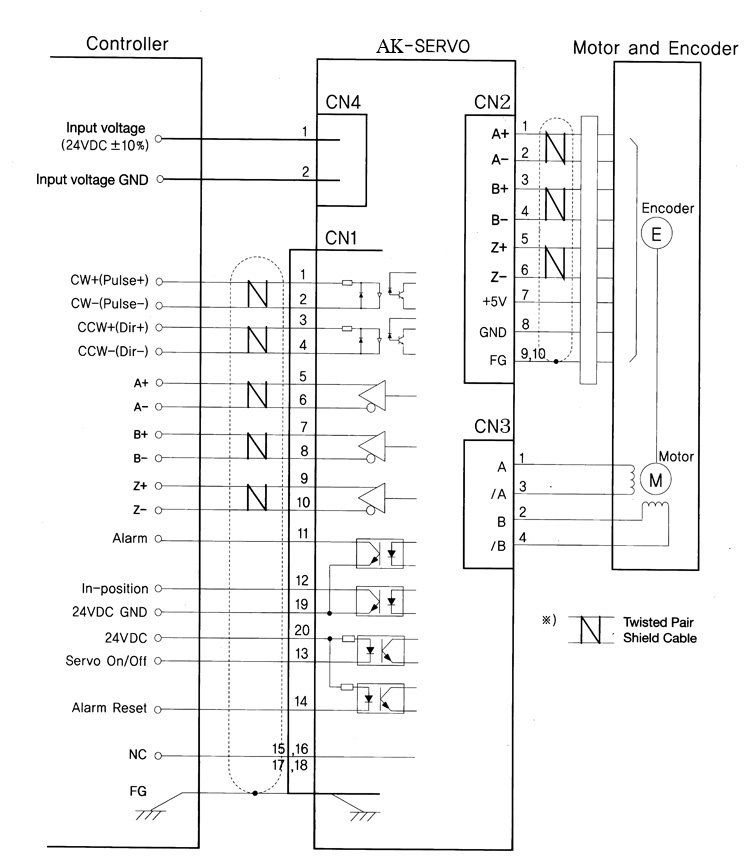
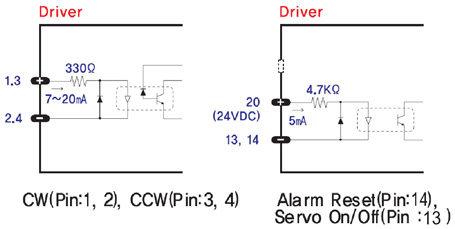
● 控制信號 input/output 詳述
輸入驅動信號全是光耦合輸入。此信號顯示內部光耦合的現在狀態。
[ON:傳導],[OFF:不傳導] 不會列出信號的電壓等級。
◆伺服 On / Off
這個輸入只能使用手動來調整從負載端馬達承軸的位置。若設定信號為[ON],則驅動器會切斷它供應給馬達的電源,然後就可用手動來調整輸出的位置;當設信號為[OFF],則驅動器重新開始供應馬達電流,並且重新恢復控制轉矩。當驅動馬達時,其中需要設定信號 [OFF]。一般來說操作時只要設定信號[OFF]或切斷電線的信號即可。
◆警報重新設定
當保護模式被啟動,信號即為警告重新設定輸入取消此警告輸出。
◆CW, CCW 輸入
此信號使用於使用端的主運動控制器來接收位置的脈衝指令。使用者可以選擇單脈衝 輸入模式 或雙脈衝輸入模式(開關No.1 , SW1)

當驅動器輸出信息,皆為光耦合輸出(警示, 定位完成)以及線性驅動器輸出(編碼器信號)。在光耦合輸出的情況中,信號指出內部的光耦合狀態[ON:傳導],[OFF:不傳導],不列出信號電壓等級。
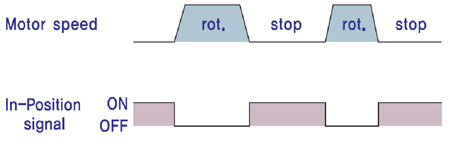
◆定位
所在位置是[ON],表示定位已經完成。此信號是指當被開關SW4設定值中馬達位置錯誤時輸出。
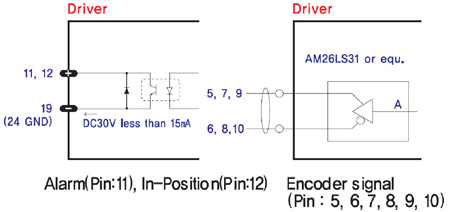
◆編碼器信號
編碼器信號是一項線性驅動輸出。可以用於確認停止的位置
◆警報
警報輸出是是[ON],指驅動器在一般正常操作。假設保護模式已被啟動,即會變成[OFF]。主控制器需要去刪除這項信息並且停止傳送馬達指令。當驅動器刪除不正常的操作如馬達過量負荷或過量電流,即設定警報為[OFF],並閃爍警報LED,切斷馬達並同時停止馬達。
[警告]只在警報輸出埠,光耦合的操作是在反向狀態,或當警報輸出時為[OFF]
1.位置精確不失步。
2.穩定的位置以及甚至由於外力例如機械振動所造成的錯誤也能自動恢復原本的位置
3.AK-SERVO含概100%所有額定轉矩範圍,相對一般開放式步進驅動器需考慮到失步問題,故只能使用50%定額轉矩。
4.由於控制負載電流,故適用於高速操作,有別於定電流開回路的步進驅動方式,沒有考慮到不同的負載狀況。
●優於開回路控制的步進驅動
● 優於一般伺服馬達
1.無須做GAIN的調整(自動調整增益響應負載變化)
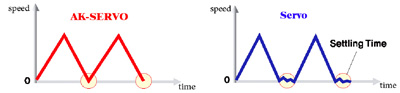
2.維持穩定的位置控制,完成定位之後沒有振動。
3.由電路板上DSP獨立控制故可快速定位。
4.適合在短行程快速位移整定時間短的應用。
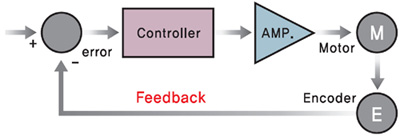
AK-SERVO是一項創新式的閉迴路步進伺服馬達採用高解析度的光學式編碼器作為回授,每25微秒的高速取樣時間追蹤位置,若有位置上的偏差可即時的修正補償位置偏差量,比如說突然負載的變動而產生瞬間的失步或位置誤差,這是傳統的步進馬達時常會發生的。本產品可克服以上缺失。
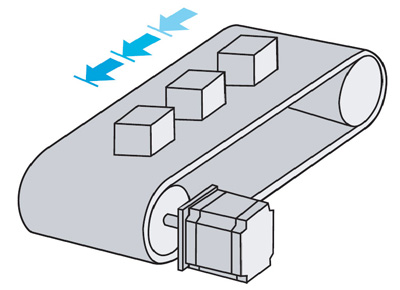
為了補償控制的效能在伺服系統裡面需要不斷的調整PID GAIN以對應負載的變動,這個程序對工程師而言是非常的繁瑣同時也需要許多的使用經驗,AK-SERVO在閉迴路步進伺服控制系統可完全的控制這個特性,可以讓工程師很簡單的就可以達到他們所需要的效能,尤其 AK-SERVO非常適合在低剛性的負載 ,如皮帶及PULLEY系統,在使用伺服系統時,它們有一個共通的問題,就是要一直做補償的動作。
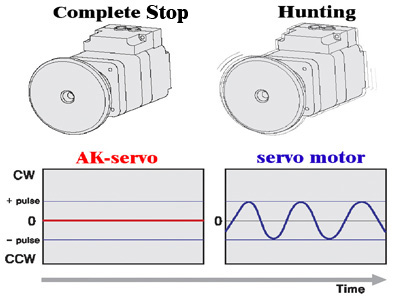
另外,跟傳統的伺服馬達做比較,它沒有一般伺服馬達一直要做追隨補償的動作, AK-SERVO是利用步進馬達的特性,當到達目標位置時,AK-SERVO 不會再做任何補償的動作,此特點特點多是應用在影像系統,因為影像系統停止時不能有抖動現像。
AK-SERVO是一個高精密式的驅動系統,它使用一個高解析度的編碼器,10000 pulse/revolution ,它不像一般的微步進驅動方式,它是使用高效能的 DSP做向量控制還有濾波控制產生一個非常平滑的運轉,可以控制到最微小的連波。
如同一般常見的步進馬達,AK-SERVO有非常好的同步性,接受命令PULSE,非常快速的反應達到定位的動作,AK-SERVO的特性是使用在短距離快速定位的應用,尤其如果是用傳統的伺服馬達,它接受命令之後會有一個補償的延遲時間,所以它必須等待定位完了之後,才能執行下面一個動作,這個動作我們稱為"整定時間"。